|
Jiaxi Zheng I am a Reinforcement Learning Engineer at Mondo Tech (Palo Alto), working on deep RL for legged-wheeled robot locomotion and online RL fine-tuning for Vision-Language-Action models. Previously, I was a research associate at the Robotics Institute, Carnegie Mellon University, advised by Prof. Matthew Johnson-Roberson and Prof. Howie Choset, where I worked on reconfigurable underwater robotics, snake robots, and in-pipe inspection systems. Before that, I interned at Westlake University with Prof. Dixia Fan and at CUHK with Prof. Samuel Au and Xiangyu Chu. I received my B.Eng. from Dalian Maritime University in 2023, advised by Prof. Minyi Xu and Prof. Guangmin Xie. My research focuses on building novel robotic systems — from mechanism design to control and planning — with an emphasis on real-world deployment. |

|
Publications |
|
|
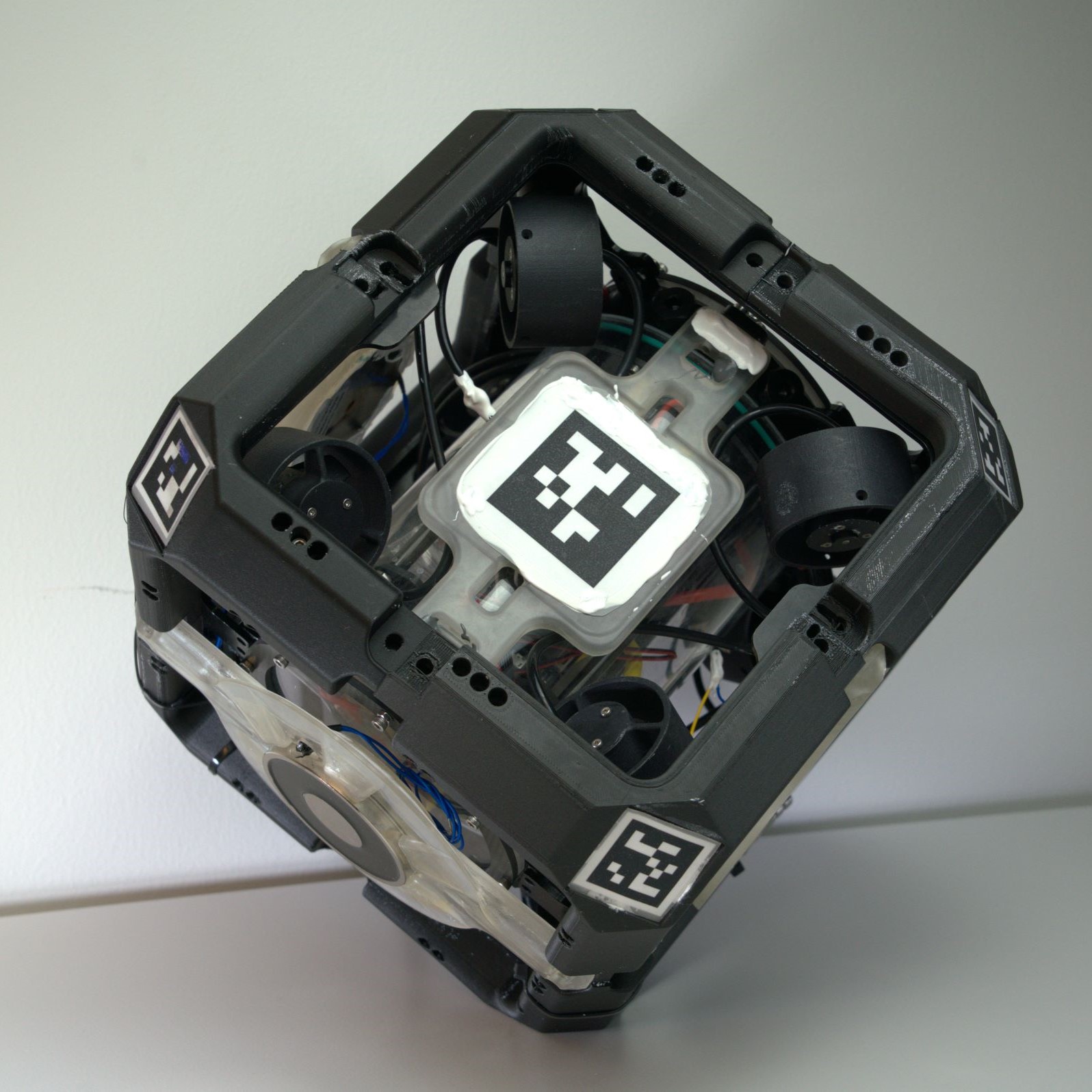
RS-ModCubes: Self-reconfigurable, Scalable, Modular Cubic Robots for Underwater Multitasking
Jiaxi Zheng, Guangmin Dai, Botao He, Zhaoyang Mu, Zhaochen Meng, Tianyi Zhang, Weiming Zhi, Dixia Fan Accepted by IEEE RA-L, 2025 project page / arXiv
|
|
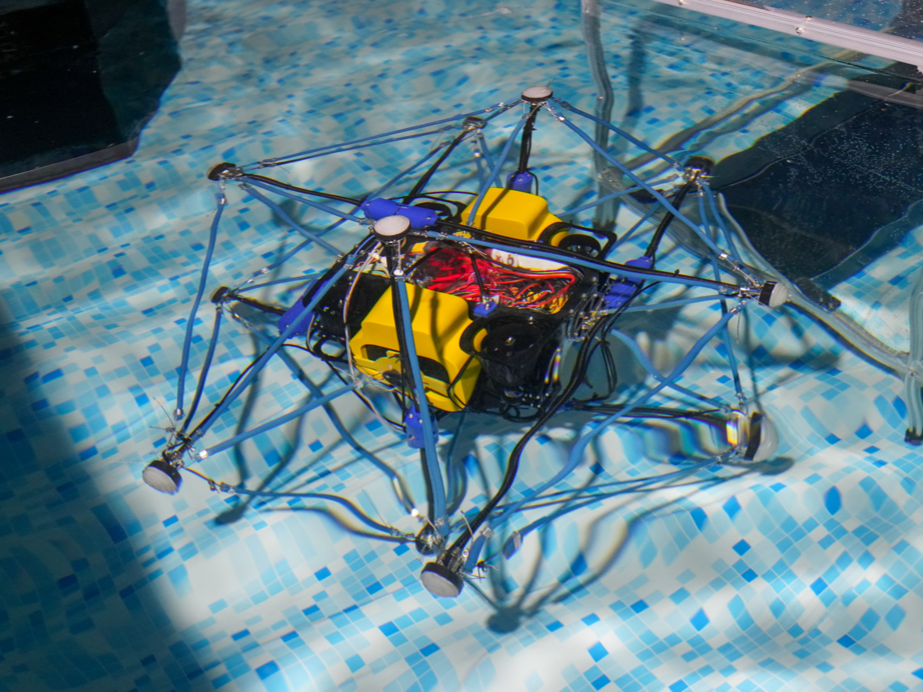
Deep-Learning-Assisted Underwater 3D Tactile Tensegrity
Peng Xu*, Jiaxi Zheng* Jianhua Liu*, Xiangyu Liu, Siyuan Wang, Xinyu Wang, Guangmin Xie, Jin Tao, Minyi Xu, AAAS Research, 2023
|

|
Design, Fabrication, and Characterization of a Hybrid Bionic Spherical Robotics With Multilegged Feedback Mechanism
Jiaxi Zheng Peng Xu, Zhaochen Meng, Jianhua Liu, Siyuan Wang, Xinyu Wang, Guangmin Xie, Jin Tao, Minyi Xu, IEEE RA-L, 2022
|
Projects |
|
|
|
Design, Fabrication, and Characterization of a Hybrid Bionic Spherical Robotics With Multilegged Feedback Mechanism
Jiaxi Zheng Peng Xu, Zhaochen Meng, Jianhua Liu, Siyuan Wang, Xinyu Wang, Guangmin Xie, Jin Tao, Minyi Xu, IEEE RA-L, 2022
|